まとめ:ペリオマチックTMA方式・B方式
ペリオマチックTMには、A方式(応答優先)とB方式(精度優先)があります。
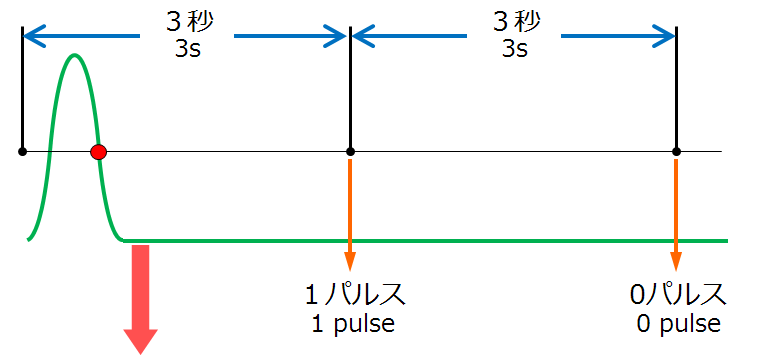
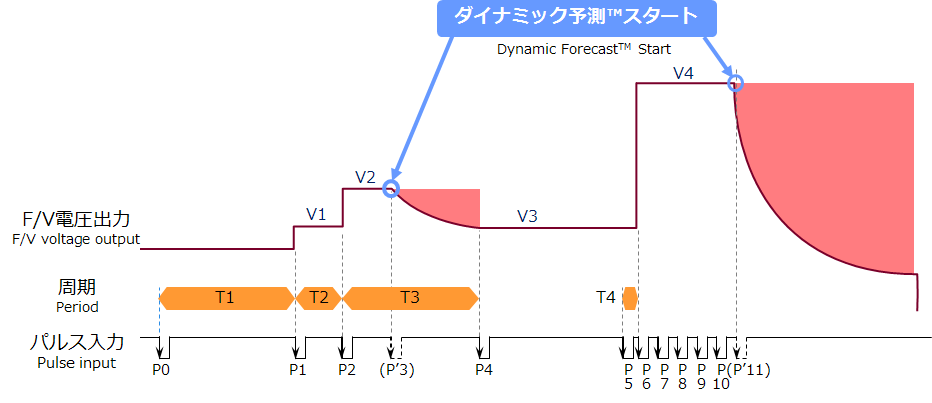
ペリオマチックTMA:独自の1パルス応答
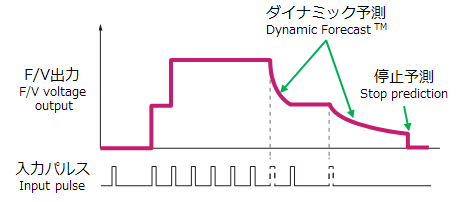
■高速応答(1パルス応答が可能)
■加速時:1パルス応答で高速応答、急加速も高精度で追従
■減速時:ダイナミック予測(双曲線予測演算)で正確な予測演算
■停止時:使用状況に応じた適宜なタイミングで停止予測
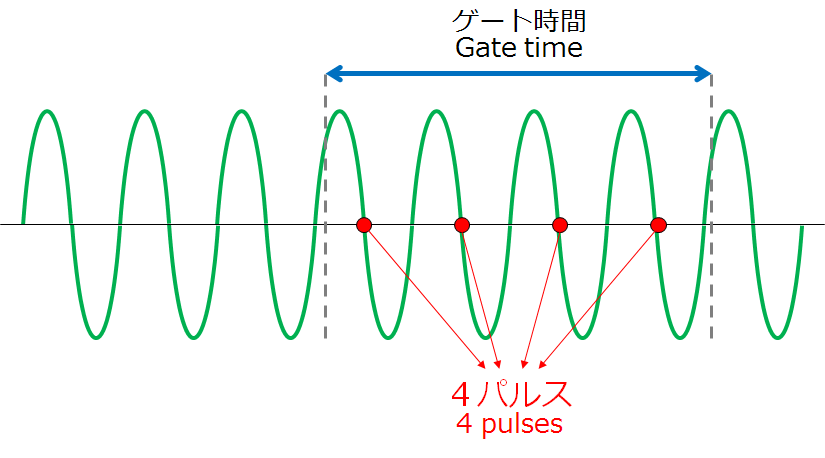
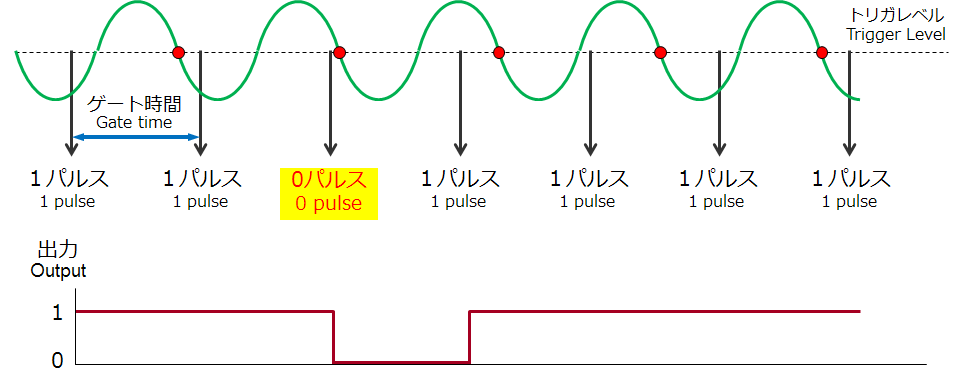
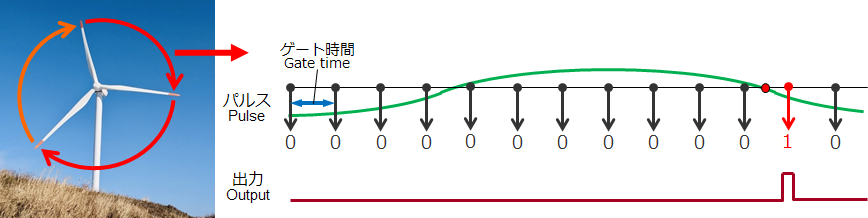
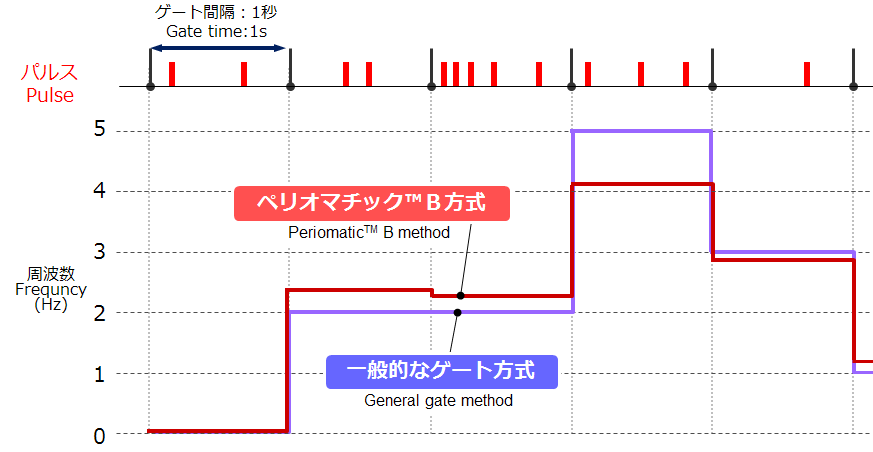
ペリオマチックTMB:独自のゲート方式
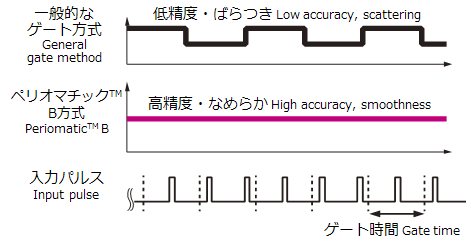
■時間平均
■短いゲート期間でも、高精度が得られる
■ゲート時間内のパルス数と周期を精密に測り、平均化
■一般的なゲート方式で起こるゲート時間内のパルス数エラーがなく、パルスのムラなどに強い
■減速時は予測演算も働き、高精度・高速応答
A方式・B方式 共通の特長
■広範囲計測(低速から高速まで) ■超低速にも強い ■高精度
ペリオマチックTM方式によって、回転速度の詳密な計測が可能になり、ココリサーチは回転解析という言葉を提唱しました。