【測定】
ペリオマチックTM
ココリサーチが世界に先がけ独自開発した、周期方式の周波数計測技術です。
・ダイナミック予測(双曲線予測演算)や停止予測も装備
・動き出しや停止、超低速から高速、急加速・急停止などの急な変化まで
・あらゆる状況下で高精度・高速応答を実現します。
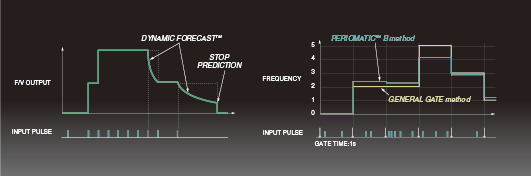
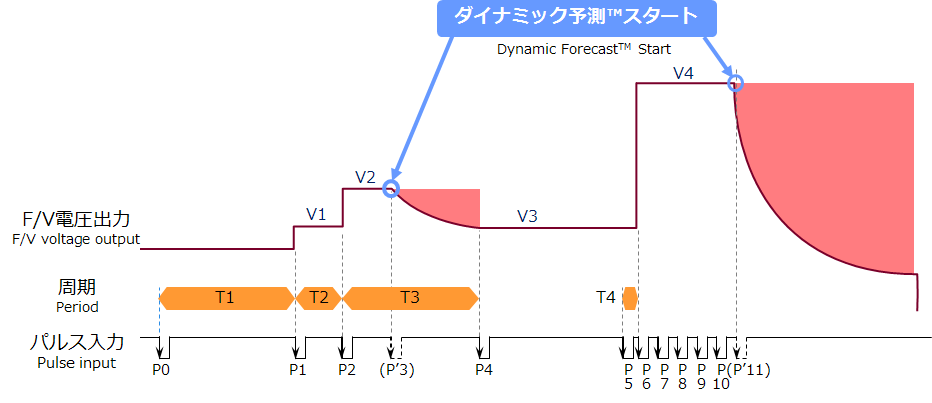
ダイナミック予測TM
入力信号の周期から測る場合、入力周波数(速度)が下がるときは、次のパルスまで応答できません。
ダイナミック予測は、次のパルス入力が1パルス前の周期より少しでも遅いと、
すぐ速度低下と判断して、双曲線予測演算をはじめます。
このカーブは次のパルスで確定すべき値と一致しています。
周波数と周期は逆数関係でf=1/T
直角座標上で直角双曲線になります
【ダイナミック予測の動作イメージ例】
次のパルスが来ない間は、図2「連続予測」のようにどこまでも双曲線予測を続けます。
超低速での長いパルス周期では、正確な出力が得られ、
高速からの急停止では、素早く応答してゼロ出力します。
停止直前の入力パルス周期の変化から予測するので、ダイナミックレンジを損なう心配はありません。
低周波数まで測れるFVコンバータでは、低周波数と入力停止の判断ができません。
そのため、低周波数にも高速からの急停止にも素早く応答できるように、
ダイナミック予測は「なし(周期保持測定)」、「連続予測」、「停止予測」のいずれかを、状況に合わせて設定できます。
【なし(周期保持測定)】
一周期ごとの測定データを保持します。予測演算も停止応答もしません。
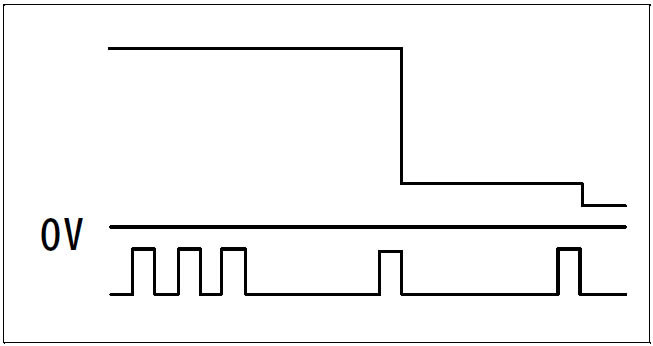
【図1】周期保持測定
【連続予測】
周波数が低下したとき、予測演算のみを行ないます。
そのため、次のパルスが入力されないとき、ダイナミックレンジの広さの分だけ図2のように曲線予測が続き、停止予測を行いません。
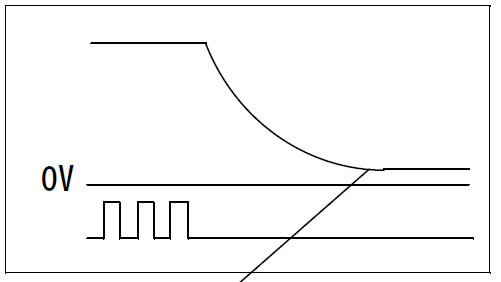
どこまでも続く漸近線
【図2】連続予測
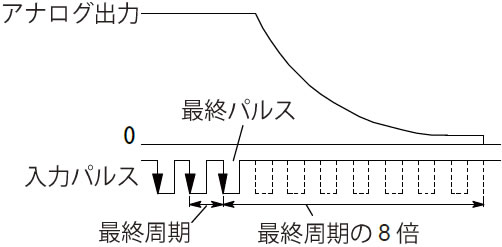
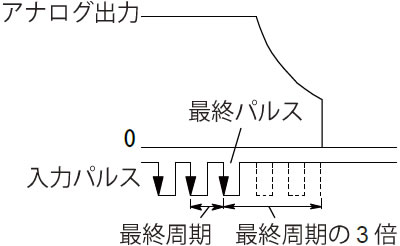
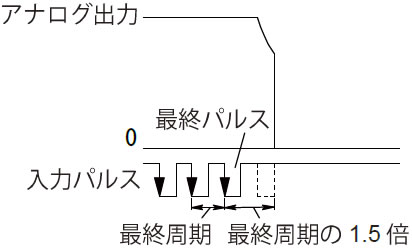
【停止予測】
停止予測・急停止検出を行ないます。設定値が大きいほど入力停止への応答性が速くなります。
停止しても停止検出しない場合は数値を大きく、停止前に停止検出してしまう場合は数値を小さく設定します。
停止応答後に再び動き出せば、内部で進行していた測定演算ですぐ正しい出力が得られます。
ココリサーチの技術
ぺリオマチック方式の演算により、動き出しや停止・超低速~高速までの広い範囲で、高精度かつ高速応答の計測を実現します。
【設定】
レイトマチック
「入力が○Hzのときに、表示を□rpmにする」といった換算設定を簡単に行える機能です。パルス数からの複雑な計算をすることなく、直感的にスケーリングが可能です。
入力周波数レートと、それに対する表示レートを設定するだけで希望の物理量に換算表示できます。
単にHz単位の周波数計として使う場合は、入力周波数レート"1"、表示レート"1" と設定し、入力周波数をそのまま表示させます。
[設定例]
例1) 周波数計として使用する (1秒間に1パルス入力)
入力周波数レート = 1
表示レート = 1
例2) 1回転100パルスのロータリエンコーダを使用し、rpm 単位で表示する
入力周波数レート = 100 [1秒間で1回転の場合100Hz]
表示レート = 60 [1回転/s = 60 回転/min]
例3) 0.12538 mL/P(パルス) の流量センサを使用し、L/min 単位で表示する
入力1Hz (1秒間に1パルス)の場合、1分間当りの流量(mL/min) を求めます。
0.12538 mL/s × 60s = 7.5228 mL/min
単位をmL からL に変換します。 7.5228 mL/min = 0.0075228 L/min
入力周波数レート = 1(Hz) 表示レート = 0.00752、もしくは
入力周波数レート = 100000(Hz) 表示レート = 752.28
【機能】演算・表示処理
出力(表示)更新時間
設定された時間ごとに入力信号を平均し、出力(表示) を更新します。
10ms と設定した場合は、10ms ごとに入力されたパルスを平均し、出力(表示)を更新していきます。
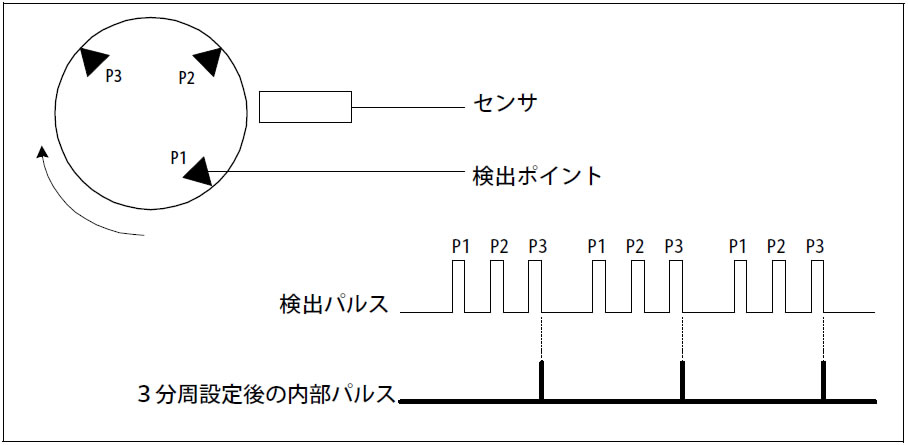
分周(パルス平均)
ギクシャク回転などの平均的速度や、不規則な位置でのパルス検出(下図)に使われます。
入力パルスをソフトウェア分周し、図の「3分周後の内部パルス」のように、規則性にすぐれたパルス列が得られます(平均速度を安定して測れます)。
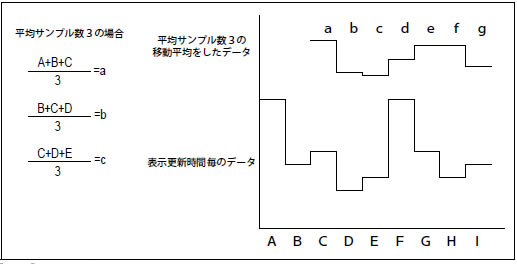
移動平均
任意のサンプルデータを平均しながら更新出力を行います。ムラの多い流量などに高速応答しながら、滑らかな出力を取り出すことができます。
演算は出力(表示)更新時間ごとに、新しい測定値を1個取り込み、一番古い測定値を1個捨てて平均化します。
例)出力(表示)更新時間を0.1 秒、平均サンプル数を3 にした場合
A、B…が、出力(表示)更新時間毎のデータ(測定値)です。
過去0.3秒間の平均値を計算しながら、出力(表示)は更新時間0.1秒ごとに応答できます。
スプレッド
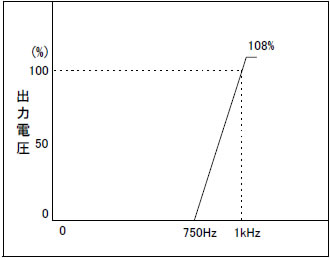
任意の周波数範囲を拡大してみることができます。上限と下限周波数を決めると、その範囲の周波数変動を、指定された出力(0-10V、4-20mAなど)で取り出せます。
例)上限値1kHz 下限値750Hzの場合、右図のようになります。ただし、分解能は下がるため、極端な拡大をすると精度くずれを起こす可能性があります。
デュアルレンジ
基本仕様で設定したフルスケールと別に、もう1つフルスケールを設定し、レンジ切替をするように使えます。
2つの異なる回転数の対象を交互に観察したり、最高回転数付近と最低回転数付近を別々のフルスケールで見れます。
例)1kHzと10Hz、2つのフルスケール(FS)を設定すると、10Hz入力時に1kHz FSで0.1V、10Hz FSで10Vを出力します。
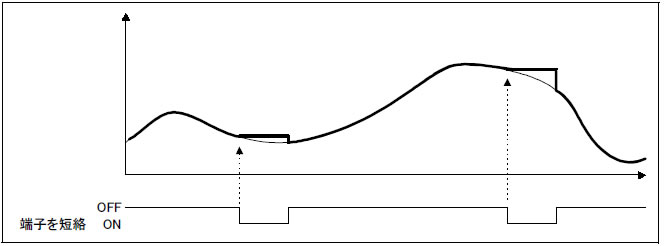
ホールド機能:現在値ホールド
ホールド用端子を短絡(ON)すると現在測定中の出力を保持し、それがOFF(Hレベル)されるまで出力は保持されます。内部測定演算は実行され続けます。
例)上限値1kHz 下限値750Hzの場合、右図のようになります。ただし、分解能は下がるため、極端な拡大をすると精度くずれを起こす可能性があります。
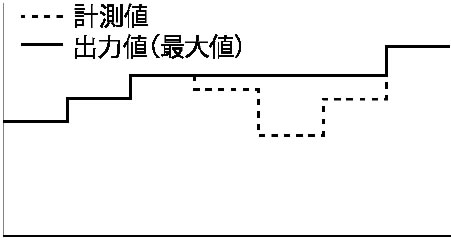
ホールド機能:最大値ホールド
ホールド端子を短絡(ON)中、データの最大値のみ更新出力します。
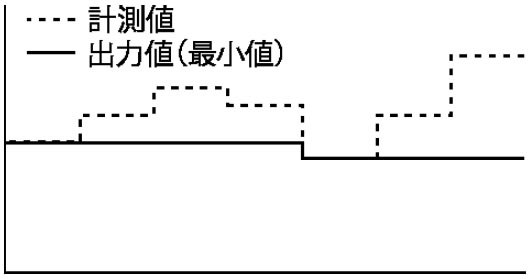
ホールド機能:最小値ホールド
ホールド端子を短絡(ON)中、データの最大値と最小値の差のみを更新出力します。
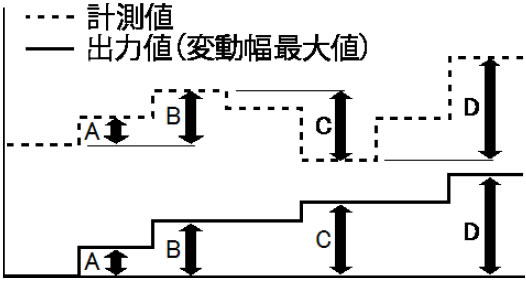
ホールド機能:変動幅最大値ホールド
ホールド端子を短絡(ON)中、データの最大値と最小値の差のみを更新出力します。
【入力信号】パルス形式
汎用信号
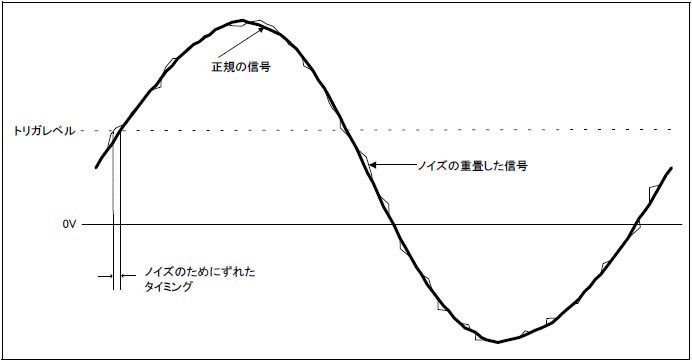
一般のパルスを含む周期性のある信号です。正弦波などにノイズが重畳(ちょうじょう)して入力すると、トリガのタイミングがずれて測定誤差の原因になり得るため、正確な測定には方形波の入力をおすすめします。
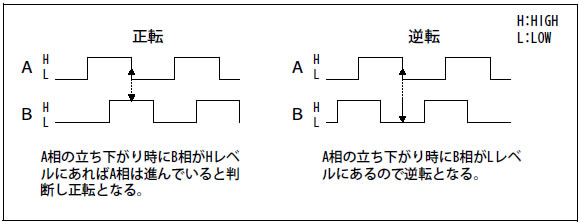
90゜位相差信号(A/B相信号)
可逆回転の測定では、90゜位相差を持った二相のパルスを入力します。A相とB相は、位相差が90゜あるので同時に変化することはなく、A相の立ち上がりをB相で見れば方向を判別できます。
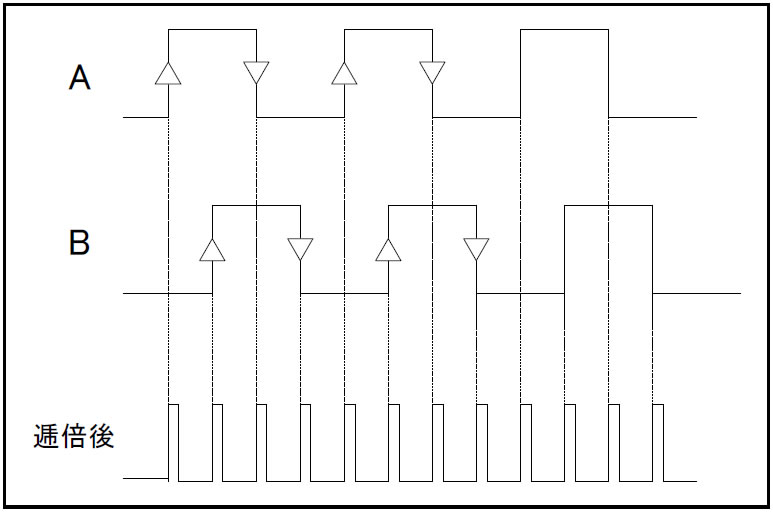
2相4逓倍信号
パルス4逓倍入力機能で、二相パルスそれぞれの立上がり/立下がりエッジを利用して、内部的に周波数を4倍にします。
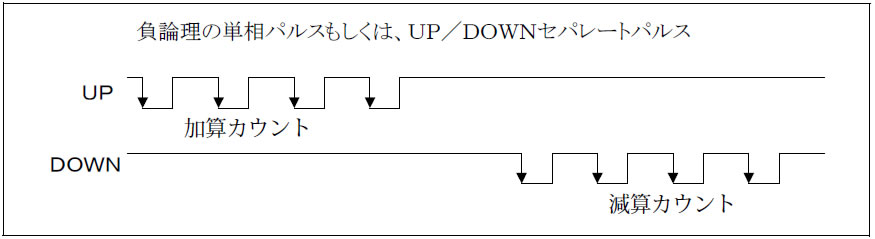
UP/DOWN 信号
可逆計数用に、90°位相差の相信号だけでなく、UP/DOWN セパレートパルスも入力できます。
A:UP信号、B:DOWN 信号のパルス入力部はそれぞれ独立し、互いの論理に無関係に立下りで計測します。
[注意] 正論理のUP/DOWN 信号は入力できません。
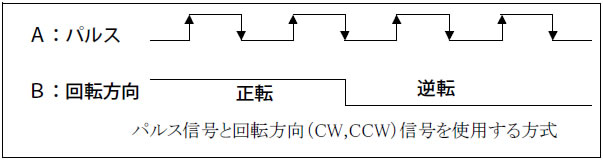
方向信号
独立したパルス信号と回転方向信号を使用します
【その他】基本用語
F/Vコンバータ
回転体など運動体の速度情報を、近接スイッチ、光センサ、エンコーダ、ギアセンサなどでパルス変換したものを入力し、速度に比例したアナログ電圧(または電流)に変換・出力するものをF/Vコンバータと呼びます。
【F/Vコンバータの使用例】

電圧・電流


PC・ロガー・オシロなど
他の制御機器に接続し、追従制御なども可能です。
周波数計と周期計
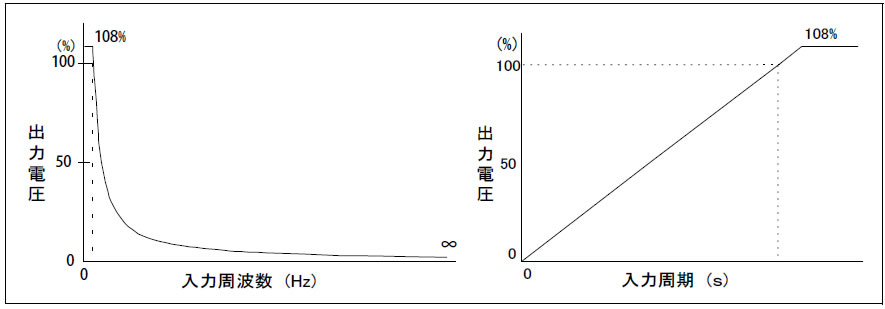
一般的にF/Vコンバータでは、周波数に比例して電圧出力が変動します。
周波数に比例して、電圧が上がるタイプを周波数計などと呼び、回転計、流量計、速度計などが含まれます。
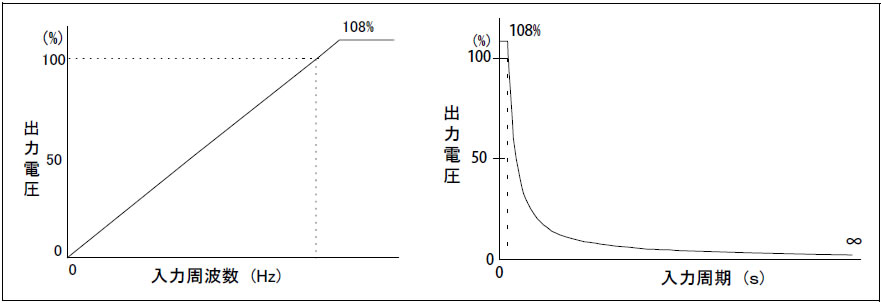
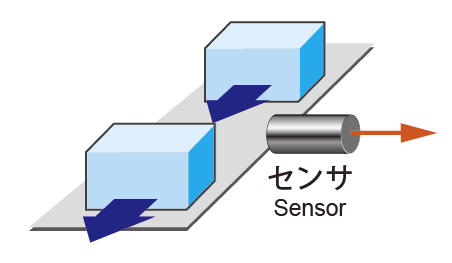
周期に比例して、電圧が変化するものを周期計などと呼び、通過時間計として、コンベア上などを物体(流体を含む)が通過する時間の計測などに使われます。
(周波数計/周期計)

電圧・電流
PC・ロガー・オシロなど
フルスケール
周波数を電圧(電流)に変換する場合、周波数が何Hz のときに何V(またはA)出力させるか決めます。
その場合、最大入力周波数と、それに対応する電圧(電流)をフルスケールと呼びます。
バイアス
バイアス設定は、計装用途などの1-5V 出力や、4-20mA 出力を得るために設けられた機能で、設定範囲は0-50% です。
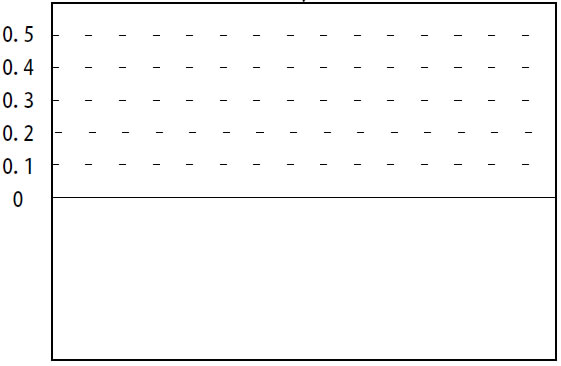
入力結合方式(AC/DC)
DC 結合: 直流成分・交流成分の両方をカットします。
AC 結合: 直流成分(DC 成分)をカットします。
直流信号が重畳(ちょうじょう)された変動を行なう入力信号の、交流変動分のみを観察するときに設定をAC にします。
DC結合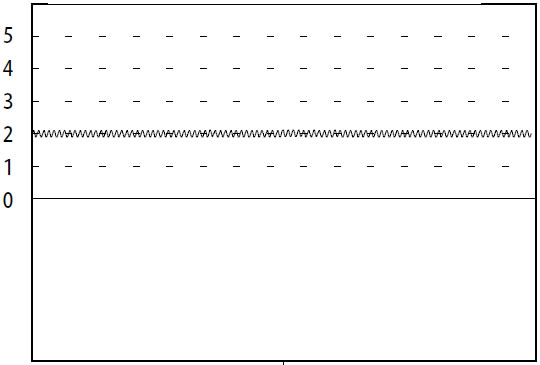 |
 |
DC結合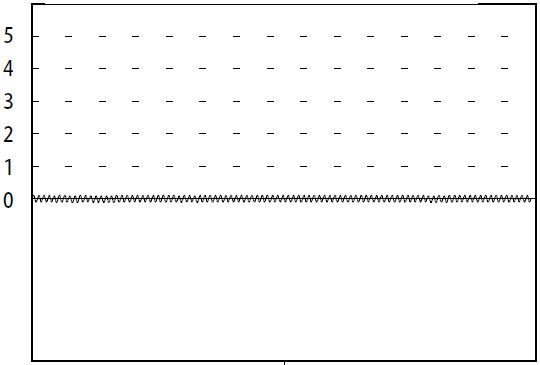 |
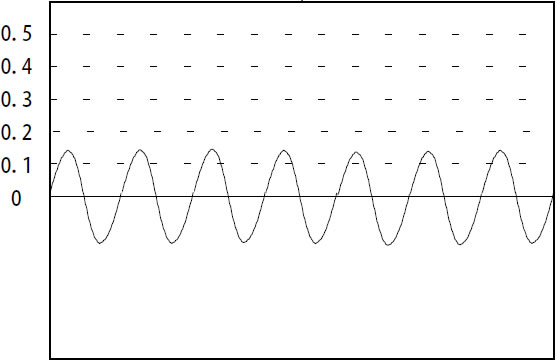
 波形を×10に拡大して見ようとすると、2V付近は表示圏外になってしまう。 |
DC(直流)成分をカットし、交流変動分のみを拡大して見ることができる。 |
|
 |
 |
|
DC結合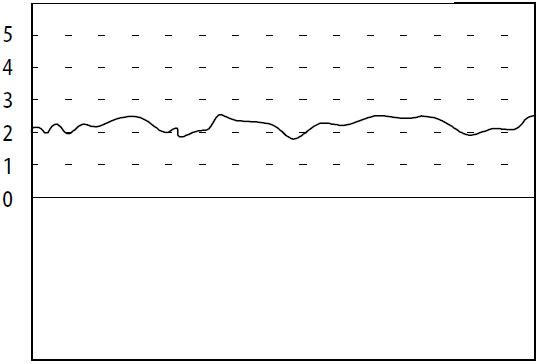 信号が不安定でトリガレベルを合わせにくい場合、AC結合にするとトリガレベルは0Vに設定され、波形が安定します。 信号が不安定でトリガレベルを合わせにくい場合、AC結合にするとトリガレベルは0Vに設定され、波形が安定します。
|
AC結合 |
キャリブレート(較正)
計測器と記録計などを接続するとき、それぞれの0% と100% の値が正確に適応していないと正しい結果が得られず、キャリブートが必要になってきます。
キャリブレータ内蔵の機器では、基準信号を発生させ、その値でのオフセット時やフルスケール時の出力を調整したり、接続機器の調整もできます。
【センサの種類】
ロータリエンコーダ
用途に応じて1回転あたりのパルス数を選べ、分解能を上げることができ、二相出力タイプでは方向判別もできます。
プーリーなどをつけて周速用センサとしても使えます。カップリングなどで軸を直接回転させる必要があります。
近接センサ
油汚れなどの悪影響でも使用でき、非接触で使用できますが、計測体と接近(約10mm以下)させる必要があります。
適用周波数1kHz 以下のものが多いです。
ギアセンサ / 光電センサ
デジタルタコメータなどに最も一般的に使われるセンサです。ゲート方式の回転計では1回転60パルス必要で、パルス数と直径が同じモジュール1のギヤが使いやすいです。高感度タイプはノイズに弱く、アンプ内蔵品もあります。


光電センサ
非接触で使えて、取付が簡単、低価格ですが、油などの悪環境では使用できません。適応周波数は1kHz 以下が多いです。
オプチカルファイバー式のものは、アンプ部と分離できるので、ノイズの影響を受けずにすむものがあります。
近接距離のとれる回帰反射タイプ、ターゲットの小さいレーザタイプなどいろいろな種類があります。
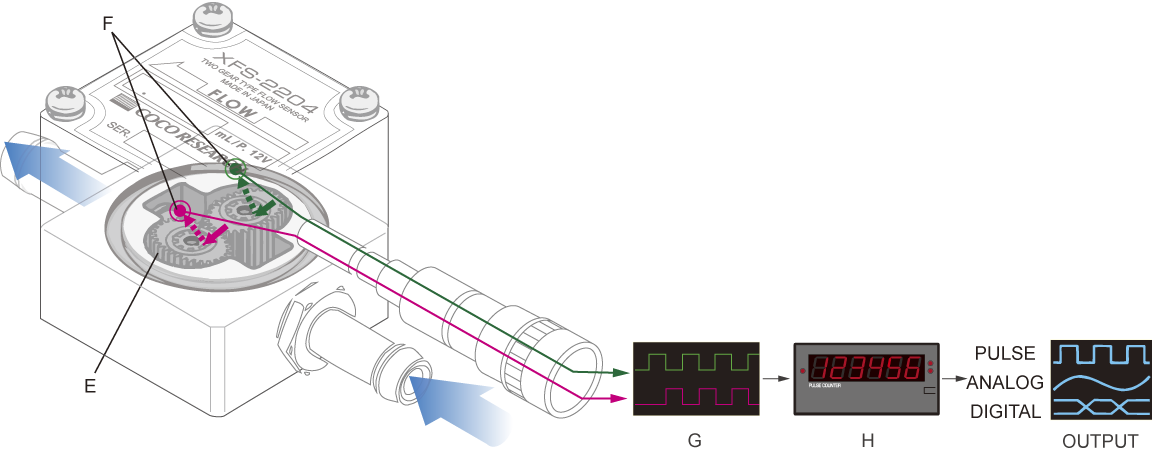
流量センサ
単位流量に比例したパルスを出力します。メーカにより様々ですが、体積に比例する容積式が精度的によく、高流量から低流量まで広い範囲に対応します。
低流量域では検出されるベーンなどの回転ムラのため、パルス周期は流量と比例しなくなります(平均的には比例と考えられる)。
1回転あたりのパルス数を多く取れなかったり、入力信号の配線が長くなることがあります。